De nombreux appareils domestiques et industriels, comme par exemple les robots cuiseurs, les perçeuses électriques manuelles à vitesse variable, les alimentations électroniques, rendent des services indéniables au quotidien. Le thyristor ou SCR (Semiconductor Controlled Rectifier) occupe une place importante dans les systèmes électroniques de commande de ces dispositifs.
On se propose de voir quelques généralités sur le fonctionnement de ce composant, et de présenter des exemples d'applications.
Sommaire
C'est quoi un thyristor?
On va d'abord se rappeler qu'une diode est obtenue par la jonction de deux semiconducteurs P et N. La famille des diodes est grande; mais il en existe une, bien curieuse; la diode Schockley du nom de son inventeur: William Schockley, obtenue par trois jonctions de quatre semiconducteurs P, N, P, N. Elle possède deux broches: une anode (A) et une cathode (K).
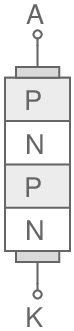
Si on ajoute à la diode Schockley une électrode supplémentaire, on a un thyristor.
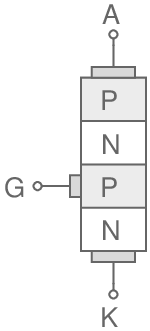
Le thyristor est un composant obtenu par trois jonctions de semiconducteurs P, N, P, N. Il possède trois broches:
-
-
-
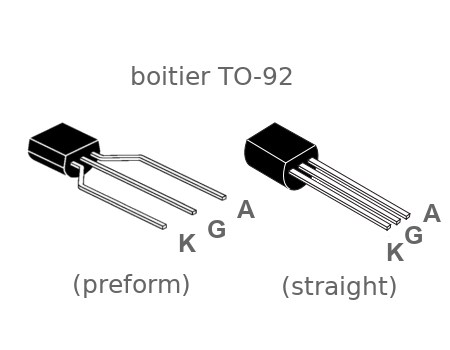
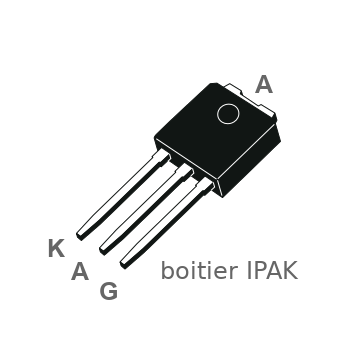
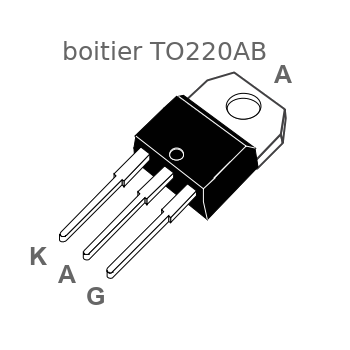
- L'anode (A);
- La cathode (K);
- La gâchette (G).
-
-
Comme une diode classique, il ne laisse passer le courant que dans un sens, et devient conducteur si on applique un faible courant sur sa gâchette pour l'amorçer.
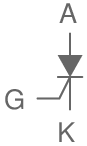
Symbole:
Fonctionnement:
La figure ci-après donne un modèle du thyristor décomposé en deux structures distinctes ayant chacune trois couches de semiconducteurs:
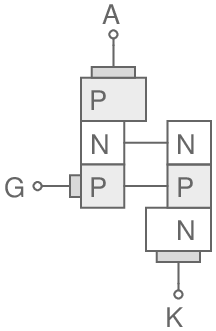
C'est comme si on avait interconnecté deux transistors bipolaires pour obtenir le montage ci-dessous:
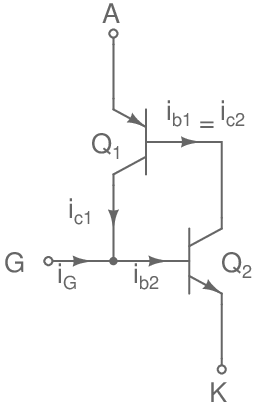
Q1 est un transistor PNP dont le gain en courant est β1, et Q2 un transistor NPN dont le gain en courant est β2.
Les deux transistors se rebouclent entre eux. D'après ce montage, le collecteur du transistor Q2 nourrit la base du transistor Q1 en courant. De même le collecteur du transistor Q1 nourrit la base du transistor Q2 en courant. Le système ainsi formé pourrai se retrouver dans une boucle auto entretenue, si une condition de départ est exécutée.
Lorsqu'il fonctionne, le thyristor n'occupe que deux états: soit il est bloqué, soit il est saturé.
On note VD, la tension entre l'anode et la cathode.
Etat bloqué:
Si on applique une tension inverse entre l'anode et la cathode (VD < 0), seule la jonction NP centrale se trouve polarisée dans le sens direct, alors que les deux jonctions d'extrémités sont dans le sens inverse. Le thyristor est bloqué.
Il reste dans cet état tant qu'un pic de tension ne force pas les deux jonctions d'extrémités à conduire. Cet aspect très important montre que le thyristor peut entrer en conduction de façon intempestive sans qu'il y ait une commande sur sa gâchette.
Etat saturé:
Si on applique une tension directe entre l'anode et la cathode (VD >0), les deux jonctions d'extrémités vont être polarisées en direct, tant dis que la jonction centrale NP sera polarisée en inverse. Aucun courant ne pourra circuler et le thyristor est bloqué.
> Prenons comme base de raisonnement le modèle du thyristor:
Dans un premier temps supposons qu'aucune commande n'est envoyée sur la gâchette (iG = 0); si iG = 0, ib2 = 0; donc ic2 = 0; si ic2 = 0, donc ib1 = 0, et ic1 aussi. Les deux transistors Q1 et Q2 sont bloqués, aucun courant ne pourra circuler entre l'anode et la cathode; le thyristor est toujours bloqué.
A présent on envoie une commande sur la gâchette iG > 0; ce courant se retrouve immédaitement sur la base du transistor Q2 et, ib2 > 0; donc ic2 = β2ib2; ib1 = ic2 = β2ib2; puisque ic1 = β1ib1 \(\iff\) ic1 = β1β2ib2 et ib2 = ic1 + iG = β1β2ib2 + iG; si la commande disparaît (iG = 0 après l'impulsion), ceci implique que β1β2ib2 = ib2 ; une boucle de courant va se créer, puis les deux transistors Q1 et Q 2 saturent rapidement, et restent verrouillés dans cet état. Le courant peut circuler entre l'anode et la cathode. Le thyristor est saturé. Cet état est maintenu tant que ce courant anode vers cathode ne baisse pas en dessous d'un seuil critique et la condition β1β2 = 1 vérifiée.
Pour résumer:
Le thyristor est un composant à trois jonctions de semiconducteurs P, N, P, N; il a trois broches: l'anode, la cathode et la gâchette, et fonctionne comme une diode classique avec un sens passant et un sens bloqué.
Il peut être modèlisé par deux transistors bipolaires interconnectés entre eux.
Propriétés du thyristor:
-
- Il opère uniquement en régime de commutation (bloqué ou saturé);
- C'est un composant contrôlé par le courant. Une faible intensité de courant sur sa gâchette entraîne la circulation d'un courant de forte intensité entre l'anode et la cathode;
- Il se comporte comme une diode de redressement classique, et conduit uniquement dans le sens direct lorsqu'un courant est appliqué sur la gâchette;
- Lorsqu'il est en conduction, le thyristor reste dans cet état même si le courant de gâchette disparaît, à condition que l'intensité du courant qui circule entre l'anode et la cathode reste toujours au dessus d'un seuil.
- Pour passer de l'état saturé à l'état bloqué, il suffit que la tension entre l'anode et la cathode passe en dessous de 0, ou l'intensité du courant qui circule entre l'anode et la cathode deviene nulle.
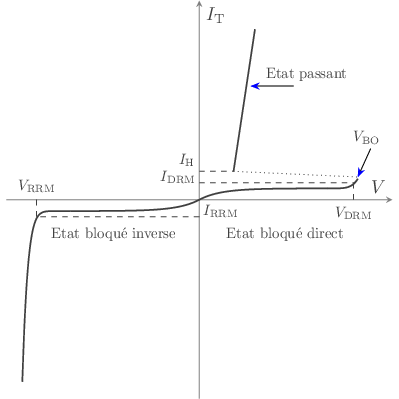
Caractéristique statique:
La figure ci-après donne la caractéristique courant - tension pour un courant de gâchette IG donné:
Principales données techniques:
Les caractéristiques techniques du thyristor, concernent les valeurs qu'il ne faudra pas dépasser sous peine de détruire le composant.
Dans la documentation constructeur on trouve les données suivantes:
-
-
- VDRM/VRRM: tensions maximales répétitives à l'état bloqué en direct et en inverse respectivement. Les courants IDRM et IRRM sont les courants de fuites associés à ces deux tensions.
- IT(RMS): courant efficace maximal à l'état passant. Il est spécifié pour une température de boitier (Tc) ou la température ambiante (Ta).
- IT(AV): courant moyen maximal dans le thyristor. Il est spécifié pour une température du boitier (Tc).
- ITSM: intensité maximale du courant IT à l'état passant ou courant de surcharge. Il est spécifié pour une durée de 10ms.
- dV/dt: vitesse limite maximale de croissance de la tension à l'état bloqué (non destructif).
- di/dt: vitesse critique maximale de croissance du courant répétitif à l'état passant.
- i2t: valeur recommandée pour dimensionner le fusible de protection (durée de la surintensité: 10ms).
- Tstg, TJ: température de stockage, respectivement de jonction.
- IGM: courant de pointe maximal entre la gâchette et la cathode. Définit pour une impulsion de 20µs.
- VRGM ou VRG: tension inverse de la gâchette. Tension inverse maximale entre la gâchette et la cathode, supportable sous-peine de destruction de la jonction.
- VBO: tension de retournement (Breakover Voltage). C'est une pointe de tension pour laquelle le thyristor passe en conduction.
-
On a aussi d'autres paramètres utiles pour aider lors de la conception d'un montage:
-
- VGT/IGT: tension nécessaire pour que le courant IGT soit atteint; et IGT c'est le courant d'amorçage. Valeurs minimales des impulsions de commande.
- IH: courant de maintien. C'est l'intensité minimale entre l'anode et la cathode pour maintenir le thyristor en conduction (à l'état saturé).
- IL: courant d'accrochage. C'est l'intensité minimale du courant à maintenir entre l'anode et la cathode après la disparition de l'impulsion de commande pour que le thyristor reste en conduction. .
- VTO/RD: tension de seuil et résistance dynamique à l'état passant. Ces deux paramètres permettent de calculer la valeur instantanée de la tension aux bornes du thyristor avec la relation VT=VTO + RDIT.
- VTM: pic de tension aux bornes du thyrirstor à l'état passant. Elle est spécifiée pour un courant IT(RMS).
- VGD/IGD: tension et courant minimals d'amorçage possible . En dessous de ces valeurs on est sûr de ne pas amorçer le thyristor de façon intempestive. Ces deux valeurs définissent la limite de bruit du circuit de commande.
Les Thyristors rapides sont caractérisés par toutes les données citées précédemment, auxquelles vont s'ajouter les caractéristiques des diodes rapides et les données spécifiques suivantes:
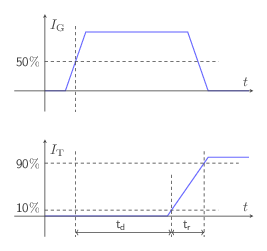
tgt: temps d'amorçage. tgt = td + tr. Avec td: le temps de retard à la croissance commandée par la gâchette; c'est le temps mis par le courant direct pour atteindre 10% de sa valeur initiale, dès que l'impulsion d'amorçage est appliquée sur la gâchette; et tr: le temps de croissance commandée par la gâchette; c'est le temps de montée du courant direct pour passer de 10% à 90% de sa valeur finale.
tq: temps de désamorçage. Le thyristor devient passant lorsqu'on lui applique une tension positive et si on l'amorce; il passe à l'état bloqué lorsque cette tension devient négative ou nulle. Si on réapplique immédiatement une tension positive entre l'anode et la cathode, dans un intervalle de temps inférieur à tq, il y aura réamorçage (même sans l'impulsion de gâchette figure - b). Si une tension positive est réappliquée après une durée supérieure à tq, le thyristor ne pourra pas se réamorçer (figure -a). Dans les deux cas on supposera que dV/dt se trouve en dessous de la limite que peut supporter le composant.
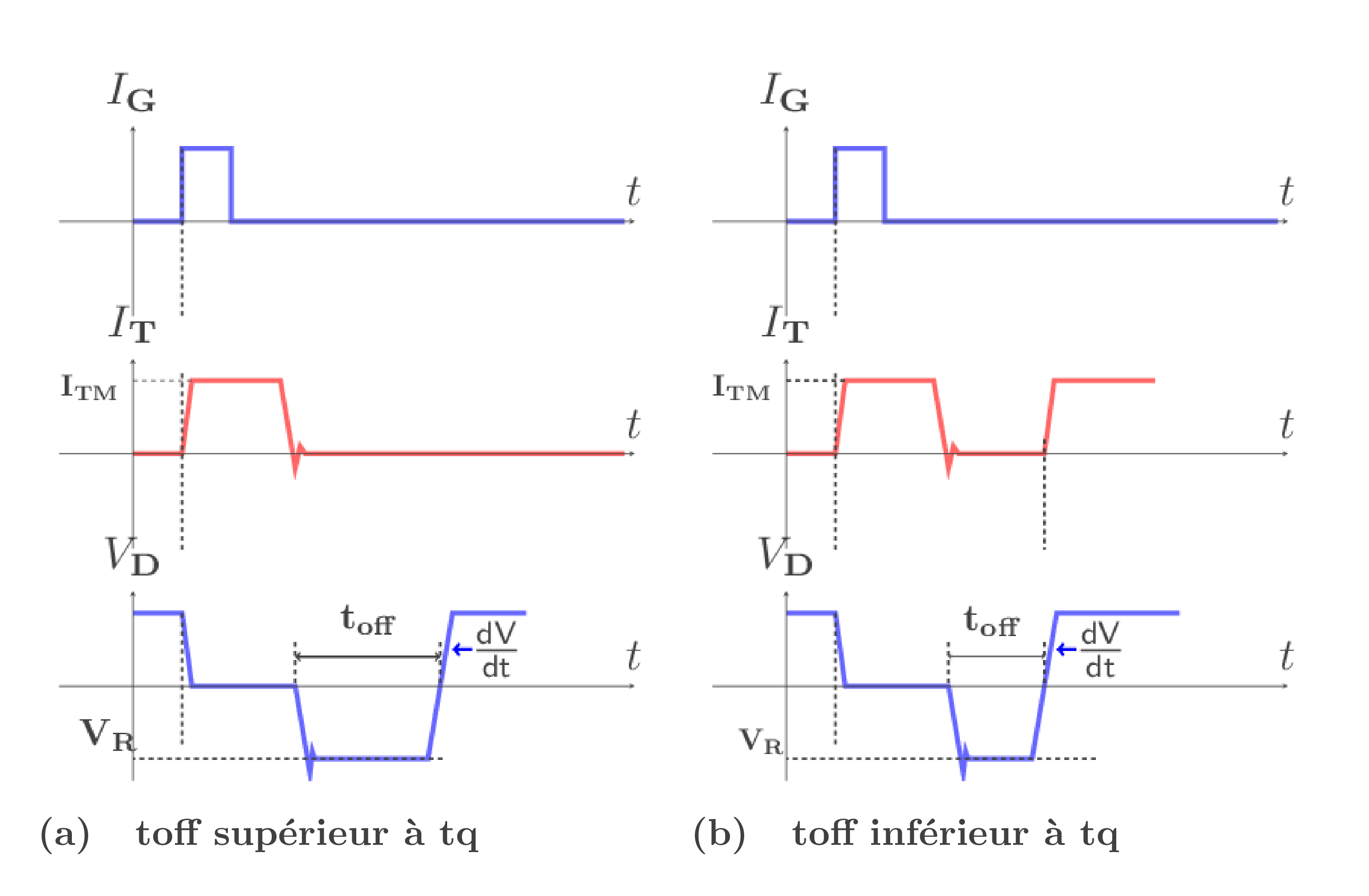
Le temps tq dépend de la température de la jonction et de la tension VRRM appliquée pendant la phase de blocage.
Protection des thyristors:
Protection contre les di/dt:
Quand le thyristor est en direct, une impusion de courant convenable sur sa gâchette va l'amorçer. Toute la surface du thyristor ne s'amorce pas instantanément. La zone de conduction va s'étaler progressivement en partant de la jonction gâchette-cathode, avant de couvrir toute la surface sous la cathode.
Mais si on envoie un courant qui croît très rapidement avant que le courant de gâchette ne s'étale totalement, il y a un risque d'apparition de points chauds compte tenu de la faible surface conductrice, cela peut entraîner la fusion de la jonction et endommager le thyristor.
Il convient donc de protéger le thyristor des montées rapides en courant di/dt. On peut réaliser cette protection en mettant une inductance en série avec le thyristor.
L'inductance doit respecter les conditions suivantes: par exemple dans le cas d'une charge résistive (RL): 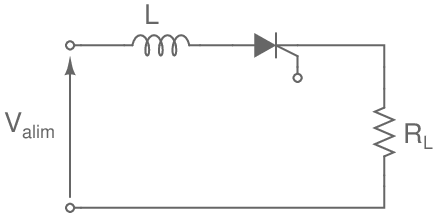
L'équation mathématique du courant instantané:
\[\mathsf{i(t) = \frac{V_{alim}}{R_L}(1 - e^{-t/τ})\text{ avec }τ = L/R_L}\]
La dérivée du courant par rapport au temps:
\[\mathsf{\frac{di}{dt}=\frac{V_{alim}}{L}e^{-t/τ}}\]
Le maximum de cette dérivée:
\[\mathsf{\left(\frac{di}{dt}\right)_{max}=\frac{V_{alim}}{L}}\]
La montée en courant du montage (di/dt) devra toujours être inférieur à celle spécifiée par le constructeur:
\[\mathsf{\implies\left(\frac{di}{dt}\right)_{max}>\frac{V_{alim}}{L}}\]
donc:
\[\mathsf{L>\frac{V_{alim}}{(di/dt)_{max}}}\]
Protection contre les dV/dt:
Quand le thyristor est dans le sens passant, même sans impulsion de gâchette, il peut rentrer en conduction si la tension directe entre l'anode et la cathode croît très rapidement (dV/dt élevé). Ce type de dysfonctionnement n'est pas destructif pour le composant. Pour l'éviter, il faut limiter la croissance rapide de la tension.
Une solution possible consiste à monter un condensateur en parallèle avec le thyristor. Mais dès que la tension disparaît, le condensateur pourrait se décharger à travers le thyristor, et entraîner une élévation du (di/dt). On peut rajouter alors une résistance en série avec le condensateur pour limiter cette variation de courant (réseau "snubber").
En insérant un réseau "snubber" dans le montage, on obtient un circuit RLC série avec les propriétés qui vont avec: phénomène d'oscillation, résonnace, amortissement, etc...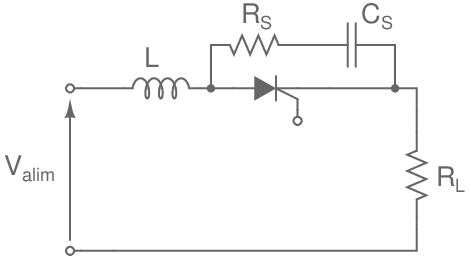
Pour le montage il faut tenir compte:
De la résistance globale: \(\mathsf{R_T=R_S + R_L}\).
La pulsation propre: \(\mathsf{ω_0=\frac{1}{\sqrt{LC_S}}}\)
Du facteur d'amortissement: \(\mathsf{α = \frac{R_T}{2L}}\).
Du coefficient d'amortissement: \(\mathsf{ρ=\large{\frac{α}{ω_0}}}\) soit \(\mathsf{ρ=\frac{R_T}{2}\sqrt{\frac{C_S}{L}}}\)
Le calcul de ce réseau "snubber", n'est pas standard, la méthode diffère selon les fabricants de thyristors; en plus il faudra tenir compte du type de charge à piloter, et d'un certain nombre de paramètres.
Dans la majorité des cas, le choix des valeurs de RS et CS sera optimum lorsque:
0.01 < ρ < 1 (ρ : le coefficient d'amortissement).
Exemple de calcul:
A l'aide de la méthode proposée dans la note d'application AN-1048/D de On-Semiconductor; on va calculer RS et CS du montage précédent, avec L = 100 µH.
Valim est une tension sinusoïdale de valeur efficace 220V, de valeur crête E = \(\mathsf{220×\sqrt{2}}\) ≈ 311 Volts.
Le constructeur propose dans la note d'application, des courbes de valeurs normalisées de dV/dt, et de la tension pointe que doit supporter le thyristor (Vpk) en fonction du coefficient d'amortissement ρ.
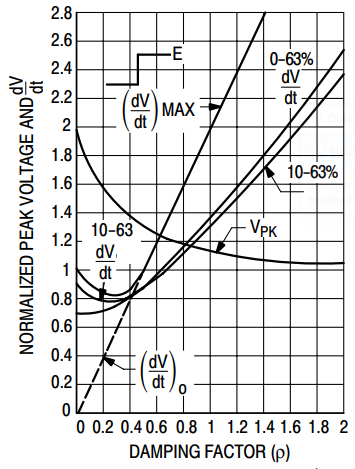
(dV/dt) normalisé = \(\mathsf{\frac{(dV/dt)_{Spec}}{Eω_0}}\).
(dV/dt)Spec: c'est la valeur spécifiée dans la documentation technique du composant.
Vpk normalisé = \(\mathsf{\frac{Vpk}{E}}\)
Si on choisit ρ = 0.3, Vpk normalisé ≈ 1.45 \(\implies\) Vpk = 1.45 x E = 1.45 x 311 = 450,75V. On peut choisir un thyristor de 600 Volts; comme une bonne partie de ce type de thyristors (dV/dt)Spec = 50 V/µs.
D'après le graphique (dV/dt) normalisé ≈ 0.73, on peut calculer ω0 = \(\mathsf{\large{\frac{(dV/dt)_{Spec}}{(dV/dt)_{normalisé}xE}}}\) = 220235 rd/s.
On peut calculer CS = \(\mathsf{\frac{1}{Lω_0^2}}\) = 0,000000206 F; soit CS = 220 nF.
On en déduit RS + RL = \(\mathsf{2×0.3×\sqrt{\frac{L}{C_S}}}\) = 13 Ω. Pour une résistance de charge fixée on peut trouver RS.
Applications des thyristors:
On trouve les thyristors dans des variateurs de vitesses des petits moteurs, comme par exmple les perçeuses, les robots cuiseurs, la protection d'alimentations électroniques, les dispositifs de protections d'installations électriques, la conversion d'énergie.
Exemples de montages:
Protection d'une alimentation continue (crowbar):
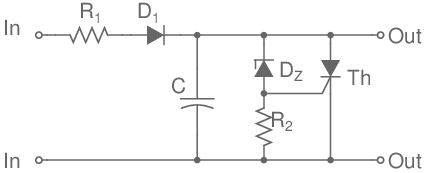
La sortie à protéger se trouve sur les broches "Out". La diode zener Dz sert à fixer le seuil de tension à ne pas dépasser. Lorsque la tension entre les bornes "In" crée un dépassement de ce seuil, la diode zener conduit, entraînant ainsi un courant de gâchette du Thyristor,qui entre en conduction à son tour et court-circuite les deux bornes "Out".
Interrupteur différentiel:
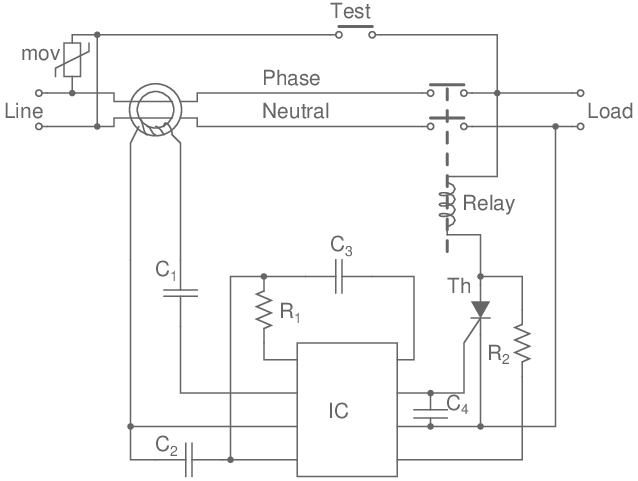
Un tore mesure en permanence la différence de courant qui rentre dans le circuit et celle qui en sort. Si cette différence n'est pas nulle, cela veut dire qu'une partie du courant s'échappe par la masse métallique d'un appareil, situé dans l'installation électrique, vers la terre. Le circuit intégré IC envoie alors une impulsion de courant sur la gâchette du thyristor qui se met aussitôt en conduction, puis alimente la bobine d'un relais qui ouvre ses contacts.
L'emploi d'un thyristor dans ce montage peut être justifié pour sa rapidité d'exécution, car l'ouverture des contacts en cas de fuite de courant doit se faire au plus vite, d'autre part il n'a besoin que d'une faible énergie pour être amorçé. Un thyristor ayant un courant de gâchette ≤ 200 µA est capable de piloter des bobines de relais de 1 A (voir documentation technique des familles X02xx, X04xx de STMicroelectronics).
Autre type de thyristor:
On peut citer le GTO (Gate Turn Off) qui s'ammorce à l'allumage et l'extinction par la gâchette. Ce composant supporte des tension très élevées à l'état bloqué (environ 1500V), et des courants de pointe bien plus grand par rapport à la moyenne admissible. De plus il peut travailler à des fréquences supérieures à 25 kHz, et sa commande peut être faite avec une tension positive pour l'amorçage, et négative pour le blocage, à faible courant.
Pour finir le tableau ci-après donne quelques thyristors:
| Exemples de thyristors | ||||||||||||
| Références | IT(RMS) (A) | VDRM/VRRM (V) | ITSM à 10ms (A) | VGT (V) | IGT (mA) | IH (mA) | VTM à ITM max (V) à (A) | tq (µs) | Tj max (°C) | i2t (A2s) 10ms | dV/dt (V/µs) | type de boitier |
| 2N6400 | 16 | 50 | 160 | 0,7 | 9 | 18 | 1,7 (max) | 15 | 125 | 145 (8,3ms) | 50 | TO220AB |
| 2N6403 | 16 | 400 | 160 | 0,7 | 9 | 18 | 1,7 (max) | 15 | 125 | 145 (8,3ms) | 50 | TO220AB |
| X006 | 0,8 | 600 | 9 | 0,8max | 0,2 | 5 | 1,35 à 1 | 125 | 0,4 | 25 | TO92 | |
| X0405MF | 4 | 600 | 30 | 0,8 | 0,05 | 5 | 1,8 à 8 | 125 | 9 | 15 | IPAK | |
| TN2010H-6T | 20 | 600 | 180 | 1,3 | 5 | 40 | 1,6 à 40 | 70 | 150 | 162 | 400 | TO220AB |
| TNY808 | 8 | 800 | 80 | 1,5 | 15 | 30 | 1,8 à 16 | 70 | 150 | 32 | 200 | TO220AB |
| BT151-1000RT | 12 | 1000 | 120 | 0,6 | 2 | 7 | 1,4 à 23 | 70 | 150 | 72 | 300 | TO220AB |
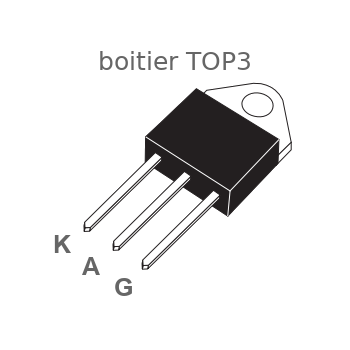
| TN8050H-12PI | 80 | 1200 | 680 | 1 | 50 | 100 | 1,55 à 64 | 150 | 150 | 2312 | 2000 | TOP3 |
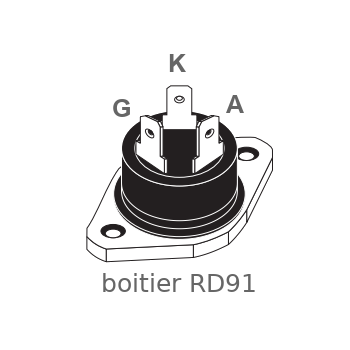
| BTW67-BTW69 | 50 | 600 à 1200 | 580 | 1,3 | 8 | 150 | 1,9 à 100 | 125 | 1680 | 1000 | RD91 - TOP3 | |
     |
||||||||||||
Sources: ST Microelectronic, Onsemiconductor, NXT Semiconductors, Littelfuse.
Conclusion:
Les thyristors sont capables de commuter des courants élevés, avec des courants d'amorçages minimes. Ils présentent une faible chute de tension quand ils sont passants, et travaillent à des fréquences moins élevées.
Comme la majorité des composants électroniques, les thyristors évoluent. Les fabricants proposent des versions de plus en plus rapides avec des durées de désamorçage ou de fermeture (tq) faibles et des vitesses de croissance de tension à l'état bloqué (dV/dt) élevées, afin de répondre aux exigeances industrielles.
Jt BB
Reférences:
Thyristor Theory and Design Consideration - Handbook - Rev. Nov - 2006. ON Semiconductor.
